ToF Sensor
Firing Patterns
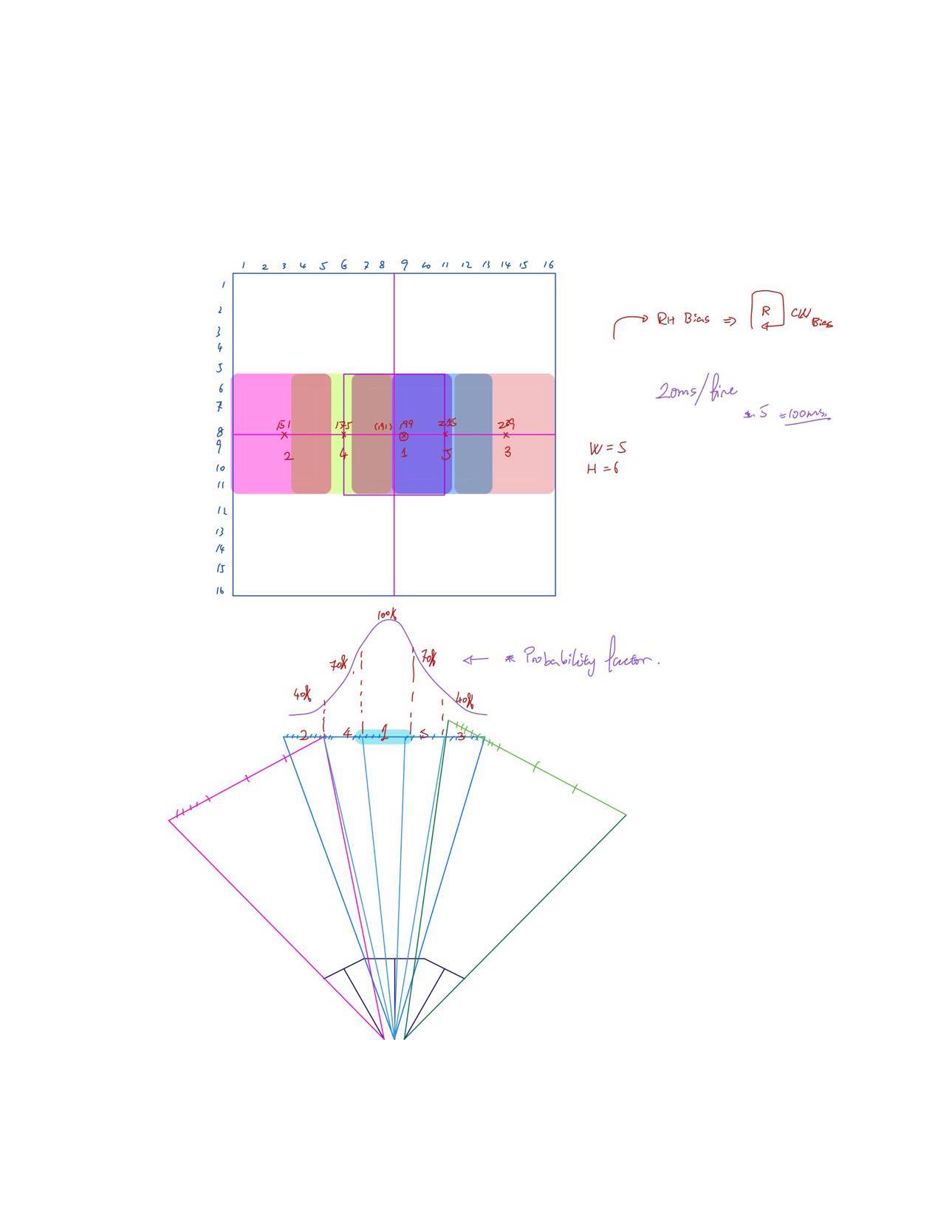
We will use a unique firing strategy for the ToF sensors. Firstly, we will only care about the middle section of the adjustable ToF regions to eliminate the refection interference from the table surface. Then we divide the middle section into five overlapped regions as shown below. This way, we may assign probability distribution to each regions, since the direct measurements are often more confident then the corner regions based on sensor datasheet.
In addition, the unique fire pattern can ensure us to sample five regions per sensor per 100ms. In total, we may obtain 5 degree resolution out of 75 degrees field of view at a frequency of 10Hz. This will give us a resolution of 8.7cm at distance of 1m, which is smaller than our robot. In addition, at this short distance mode, it is only capable to detect up to 1.2m with a strong robustness to ambient light.
Lastly, in order to take into account potential sensor delays and signal corruptions, the firing sequence (as shown below) in a jumping order can guarantee the most coverage per full sequence.
RTOS Firing Proof
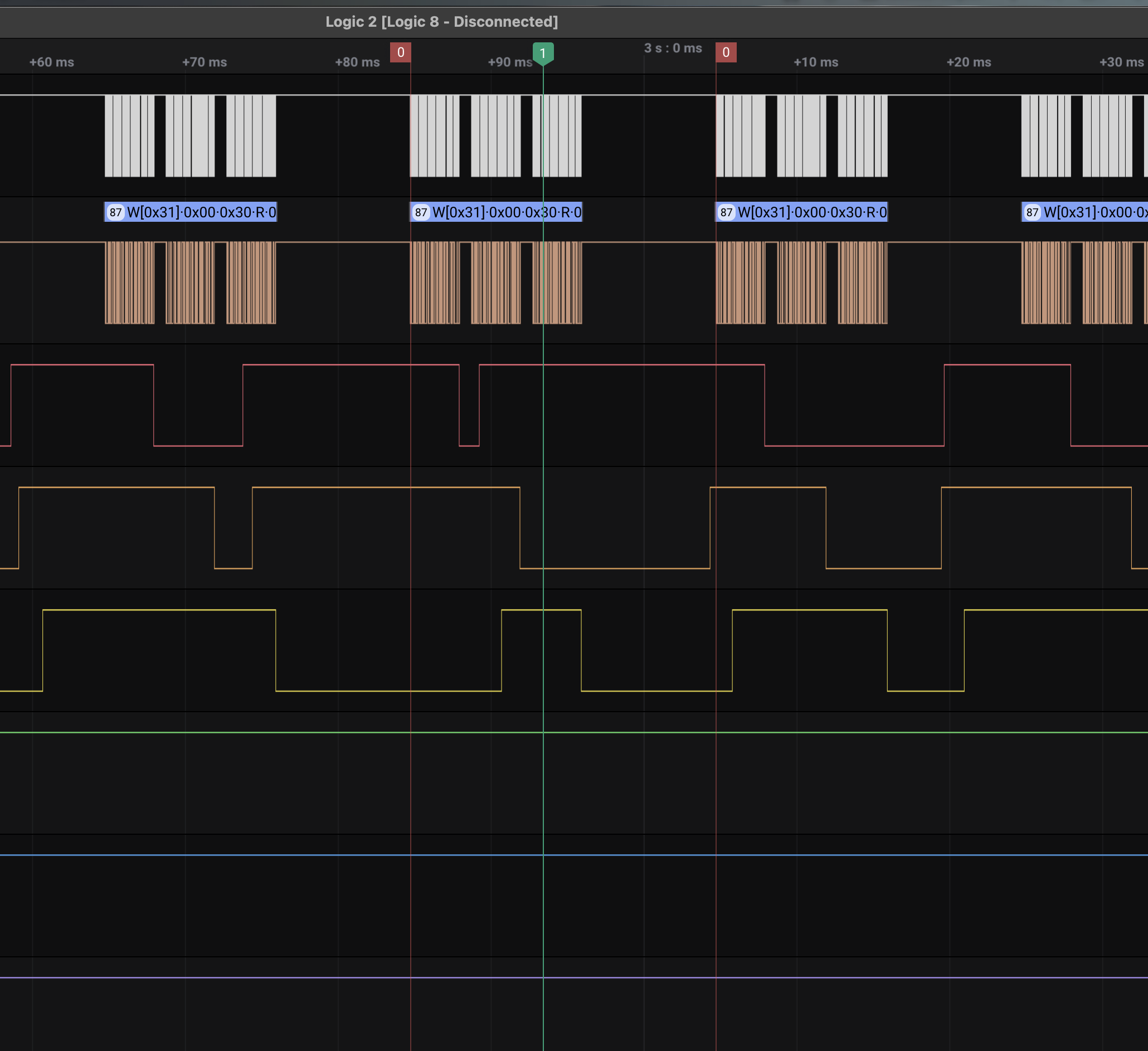
As discussed above, the sweat spot of firing frequency would be 20ms for a set of three sensors. We may see the RTOS is ensuring an firing frequency of 50Hz, and 10Hz for a full scan. By design, this firing pattern can ensure a 8.3 degree resolution at 30Hz, and the last two firing nodes are used to improve the joint probability, hence increasing the resolution. The I2C occupies 60% of the current task. Hence, further investigation may needed when more tasks are being introduced to the system.
Calibration
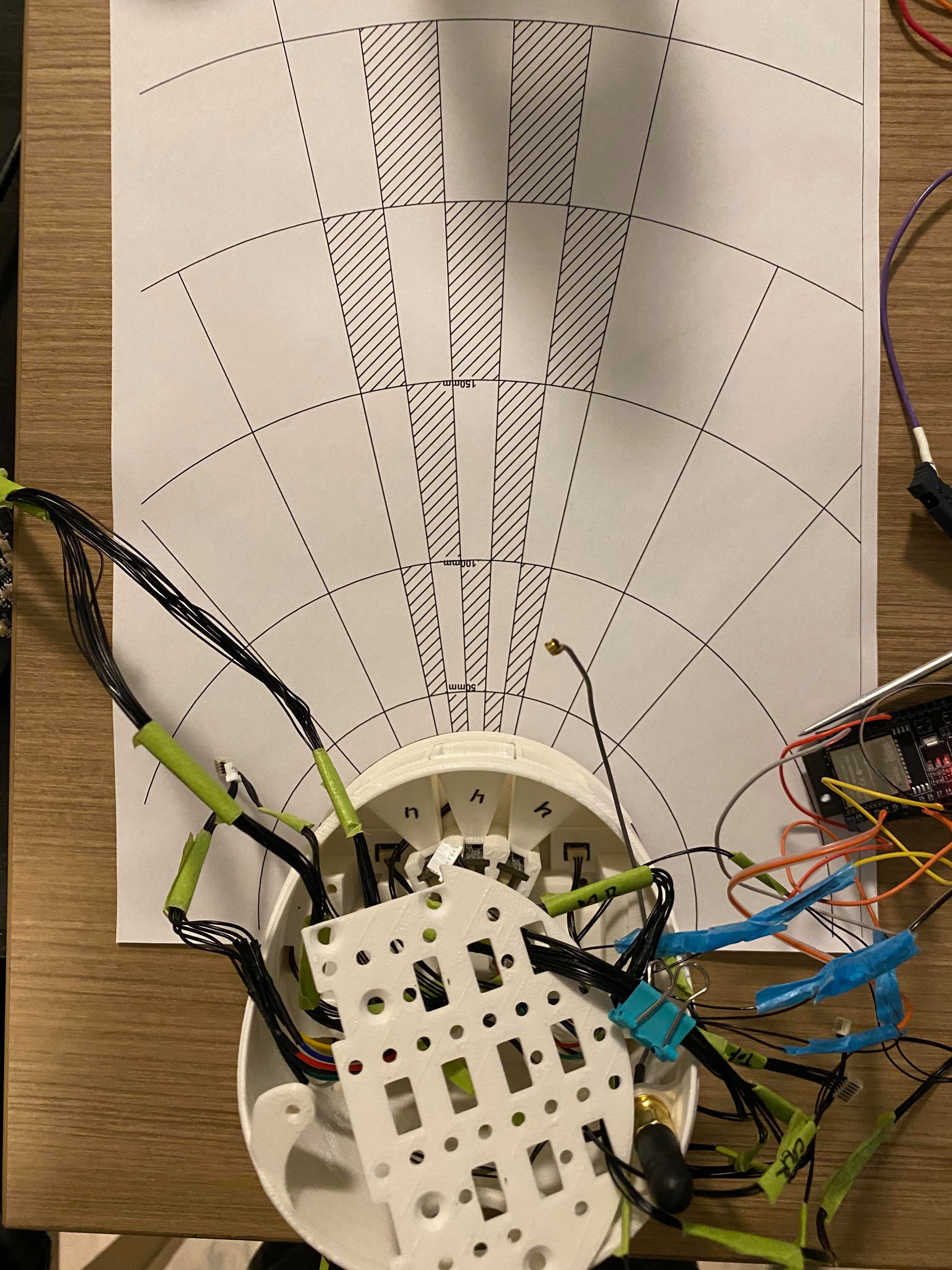
In order to obtain an accuracy within 5mm, it is recommended to calibrate all the sensors. This feature is currently under progress (latest: Feb. 20). For current testing, we printed out the sensor arrangement in 1:1 scale, and place obstacles on the field to determine its close-distance accuracy and calibration adjustments.

Jack is always building cool robots.